

车联网、5G、自动驾驶彼此有什么关系?
原标题:车联网、5G、自动驾驶
车联网、5G、自动驾驶,都是近些年热得发烫的技术,大家肯定都听说过这些名词,但你清楚这三者之间是什么关系吗?且听我一一道来。
什么是车联网
车联网是个很庞大的体系,简单地说就一句话,把汽车连接起来的网络,详细地说可就复杂了。车联网本质上是物联网的一种,但是有其特殊性:高速移动,情况瞬息万变,对响应速度要求极高,区域跨度大等等。
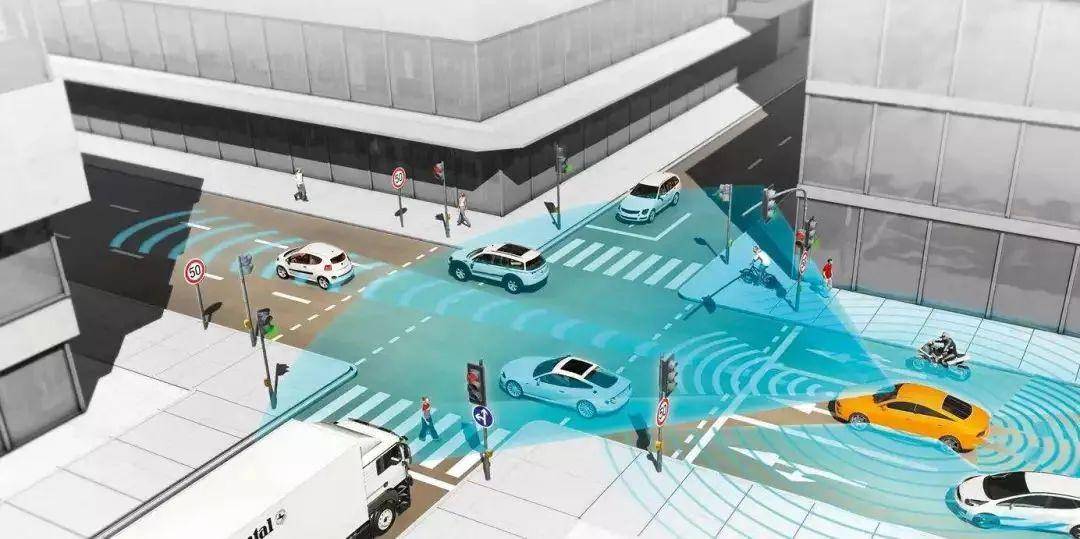
鉴于实际情况的复杂性,车联网不仅要把汽车都连在一起互通信息,汽车还要与行人、基础设施(路灯、信号灯等)、网络等连接在一起,从而有这些概念:
V2V:Vehicle to Vehicle,车与车
V2P:Vehicle to Pedestrian,车与行人
V2I:Vehicle to Infrastructure,车与基础设施
V2N:Vehicle to Network,车与网络

不管是V2什么,都可以统称为V2X。真正的车联网,就是车连万物!
从一辆车的角度看,车联网又可以分成两块:车内各电子装置之间的通信、汽车与驾驶员/乘客之间的通信等,是车内网,这块实现起来没什么难度;汽车与车外所有对象的通信,这块是车联网的核心部分,是各方关注的焦点。
目前有两种方案,一种叫DSRC技术(专用短程通信),基于WIFI的成熟技术,已经广泛用于不停车收费、出入控制、车队管理等,我们熟知的ETC系统就是基于此技术实现;另一种叫C-V2X技术(蜂窝车联网),基于蜂窝网络(就是我们熟知的手机移动通信网络)尤其是当前的5G技术。
这两个技术方案目前斗争比较激烈,都想成为未来车联网技术的主流标准。2019年欧盟对这个问题进行了表决,最终是否决了DSRC,选择支持C-V2X。而我们中国,也是倾向于支持C-V2X技术。
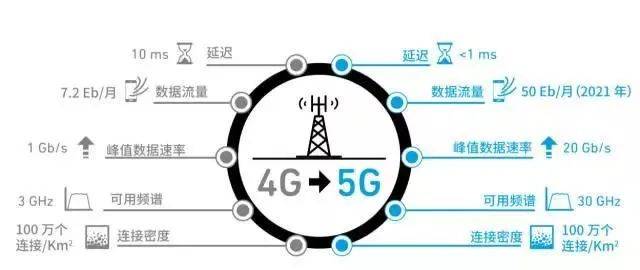
这两种技术各有优缺点。DSRC技术很成熟,比较适合短距离通信;而C-V2X技术是后起之秀,能解决长距离通信问题。特别是在移动通信技术进化到5G后,在带宽和时延等指标上也不逊色于前者。更重要的是,后者可以重用已经广泛存在的移动通信基础设施,可以低成本的实现网络覆盖!
我们中国拥有世界上最大的移动通信网络,同时在5G技术上也是居于世界领先地位,所以,我们选择C-V2X技术实现车联网是毫无疑义的。
基于5G的车联网
在5G之前,基于蜂窝网络实现的车联网技术叫LTE-V,随着蜂窝通信技术进化到5G,LTE-V也就进化到5G NR C-V2X。基于C-V2X技术实现车联网,是我国目前研究的热点和未来的发展方向,但是目前存在一些问题需要解决,例如:
1、网络频繁切换
5G无线频率更高、覆盖范围小,未来城市的每个灯柱可能就是一个小基站,因此汽车在行驶过程中必然会在不同基站之间频繁切换,这对需要快速通信、高速处理的自动驾驶汽车来说会造成一定的干扰。
2、通信安全与隐私
在整个C-V2X车联网架构体系中,任何人或物都可以很容易的加入到通信网络中,成为通信链路的一个环节。在这些环节中,恶意的攻击者可能未经允许窃听通信双方的通信内容,可能将原本要转发的重要信息恶意丢弃,可能故意发送伪造的数据欺骗系统,等等。
攻击者通过发送大量冗余消息堵塞通信信道,以阻止重要信息到达,例如在车祸后,攻击者阻断警告信息的传递,从而导致连环车祸的发生。攻击者通过安装恶意代码或者通过蜂窝网络远程控制车辆,例如远程启动车辆刹车。攻击者可以释放伪造数据,例如道路拥挤数据,从而让自己能占用道路资源。
最近有这样一个故事,说欧洲有一位行为艺术家,拉着一辆拖车在公路边行走,拖车里装满了处于开机状态的智能手机,结果,他走到哪里,哪里的谷歌地图就显示为道路堵塞。这个故事不知真假,但还是给我们敲响了警钟!
当然,还存在其他一些问题,但是通信安全和隐私问题是最重要的,因为车联网中汽车大都处于高速移动状态,一旦网络通信出现意外(不管是有意还是恶意造成的),可能就会造成车毁人亡的惨重代价!
车联网与自动驾驶
自动驾驶的核心是车,不是网。没有车联网,其实也能自动驾驶;但是没有车联网,就无法真正实现全场景的自动驾驶。
例如,当前的谷歌、特斯拉等自动驾驶系统,基于雷达和摄像头的各种信息输入,通过人工智能技术决策,单车本身在一定程度上即可以自动驾驶。但是单车本身有很大的局限性,在晚上、雨雪天、雾天等恶劣天气下,在交叉路口、拐弯处等场景中,雷达、摄像头看不见、看不清、看不准。特斯拉曾发生过一次致命事故,在强烈的日照条件下,自动驾驶未能识别出卡车的白色车身,因此未能及时启动刹车系统。针对这些场景开发性能更强的传感器,成本会高到消费者无法承受的地步。这就需要车联网里的V2X通信,提供远超出当前传感器感知范围的信息。
本质上可以把V2X视为一个拉长拉远的“传感器”,通过和周边车辆、道路、基础设施的通信,获取比单车能得到的更多的信息,大大增强对周围环境的感知。5G网络本身具有的超大带宽超低时延特性,可以实时搜集、传输更多更精确的环境信息,使用云化的计算能力用以车辆本身自动驾驶的决策。
因此,在实现车辆自动驾驶场景中,V2X是一个必要且增值的使能技术;换句话说,即便车辆本身就可以实现部分自动驾驶,通过车联网技术依然可以进一步提升性能,且可以降低单车部署传感器的成本,减少对高精度传感器的依赖。
同时据非官方数据,车企内部验证的结果是基于多车信息汇总的决策会比单车信息基础上的决策在可靠性上提高三个数量级(注意这里并没有要求路上所有的车辆都拥有V2X功能,车流中的部分车辆进行信息共享即可在一定程度上提高单车与整体决策的可靠性),这是V2X的又一重要价值所在。
所以在未来很长一段时间,尽管路上会是V2X与非V2X车辆共存的局面,单车由V2X技术所带来的增益会随V2X车型渗透率提高而逐步提升,从而正向驱动非V2X车辆的升级和替换。
由V2X使能的自动驾驶场景中,各种决策还是来自车辆本身。这一点决定了在车联网这个环境里车本身是个独立的决策主体,即使是车连上了网或者连成了网。这个结果是由两个事实决定的:
第一,车主不会希望将自己的安危交给其它车或者第三方决定,周边车提供的信息只是给本车做参考用,最终的决策还是在本车实现。周边车辆的指令信息,特别是类似于“前车指令后车刹车”等决策信息是不会被本车直接采信的,此类信息必须是经过几层过滤,和本车上传感器的信息对比以后才会由本车决定采纳或拒绝。
第二,从商业角度考虑,车厂之间是互为竞争关系的,而且会有意识的凸显不同品牌之间的差异性,自动驾驶的性能好坏也是体现差异性的特征之一。基于V2X的自动驾驶功能、对应的决策算法、硬件上比如天线数的差异性,都是体现品牌优越性的手段。所以车厂不会愿意把决策机制和算法分布到不同厂家的车上,甚至不愿意分布到自己高端和低端品牌的车上。
因此V2X之于自动驾驶,需要传递和交互的不会是最终抉择指令,只会是周边车辆与环境的状态信息。例如在超车等场景下需要周边车辆的传感器信息共享,并道等场景下需要周边车辆驾驶操作状态信息分享。这也符合前面所述V2X之于自动驾驶是一种“拉长”的传感器的定位。
本质上无论哪种应用场景,需要V2X传递的信息其实就是这两种:传感器信息共享与周边车辆驾驶操作状态信息分享。可以说,所有的V2X自动驾驶消息都是这两种信息的不同表达形式。



